SCOPE is an open source (GPL 2.0) dual redundant traffic signal control environment that was funded by the U.S. Department of Transportation under the Small Business Innovative Research (SBIR) program.
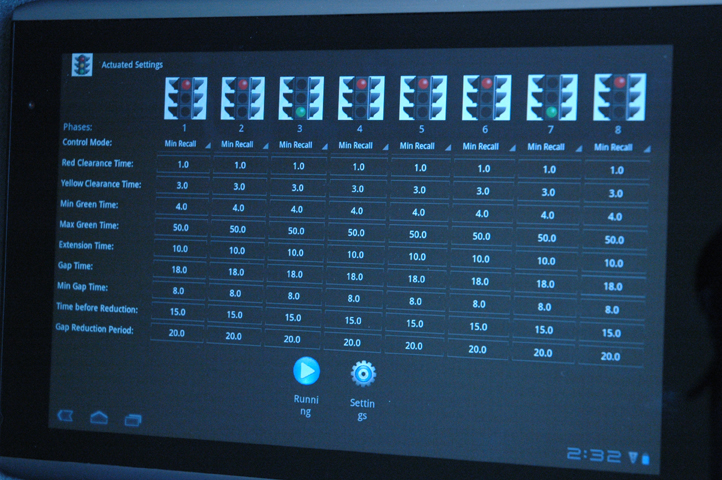
SCOPE has both pretimed and actuated control modes. In actuated mode, it has min recall, max recall, gap out, max gap, and presence modes that include NCHRP 3-66 Signal Transition Logic concepts. SCOPE interfaces with both NEMA-TS2 and Intelligent Transportation Systems (ITS) traffic cabinets. SCOPE executes under Linux or Windows. At the moment, It runs on four different hardware platforms ... a PC (used for concept and unit testing), a PowerPC prototype board with various I/O connectors (used for integration testing), a $35 ARM based Raspberry PI SOM, and an Advanced Traffic Controller (currently, a PEEK ATC-1000). SCOPE also has been integrated with the open source TEXAS traffic controller model.
SCOPE also runs with ATI's universal NTCIP libraries. This allows Central Management Systems to control SCOPE via the NTCIP standard. The NTCIP libraries have been ported to Intel processors (WIndows), PowerPC processors (Linux), and two different ARM processors (SCOPE on a PI and a UCON traffic controller). ATI's NTCIP libraries can be integrated into any traffic control or other software.


SCOPE is unique in that it contains two separate programs (called the Primary and the Secondary) that were developed by different sets of software engineers. Both programs perform the same intersection control logic while constantly exchanging intersection state information (dual-redundancy). One program was developed in C++ while the other was developed using Ada95. The same redundancy techniques used in fly-by-wire flight control systems have been incorporated into SCOPE. SCOPE can run without the secondary program if redundancy is not desired.
SCOPE has several user interfaces. It has a wireless Android tablet interface that allows a traffic engineer to change intersection parameters without opening the traffic cabinet. It has a Java based interface that allows traffic engineers to control SCOPE from a remote location. And, of course, it has a Front Panel User Interface that complies with the Advanced Traffic Controller specification.
SCOPE also has the ability to simulate 64 traffic sensors and 8 pedestrian calls. It has several menu options to facilitate real time logging and debugging. SCOPE can be ported to any hardware platform.
SCOPE requirements, design, code, and unit tests are kept under configuration control. All software requirement, design, implementation, testing, configuration management and documentation tools used to develop SCOPE are open source and free.
SCOPE has been tested extensively using a virtual traffic cabinet and in ITS traffic cabinet at a live intersection in Orlando during rush hour.

SCOPE runs on a $35 PI
We are always looking for enterprising companies, researchers, and individuals to team up with. We can test your algorithms, build low cost traffic control devices, turn traffic control concepts into prototypes, test at live facilities, help you with embedded software, etc.
In our spare time, we are currently working on a compact traffic controller with more functionality than the most expensive controller available today -
* LESS THAN 1/3 THE PRICE OF CURRENT ADVANCED TRAFFIC CONTROLLERS
* COMPLETELY OPEN SOURCE SOFTWARE!
* In Development:
A COMPACT ENCLOSURE (8in x 8in x 1in) THAT CAN BE MOUNTED ANYWHERE
A 7 INCH TOUCH SCREEN INTERFACE
Start your own web page with Mobirise